ARTIFICIAL GRAVITY:
CURRENT CONCERNS AND DESIGN CONSIDERATIONS
Tamarack R. Czarnik, MD
Resident, WSU-Aerospace Medicine
March 1999
ABSTRACT
While it causes certain engineering design and human factors disadvantages, Artificial Gravity (AG) generation has the potential to eliminate the many physiological problems of prolonged exposure to microgravity. This paper examines the primary problems faced in using rotation to produce AG, advantages and disadvantages of various proposed designs, and principal unanswered questions in the use of AG.
WHY ARTIFICIAL GRAVITY?
Prolonged human exposure to microgravity has been seen to contribute to numerous physiological problems, including fluid redistribution (and subsequent loss), cardiac and skeletal muscle deconditioning, loss of bone mineral density and so on. This deconditioning is currently fought (with variable success) only by 1-2 hours per day of aerobic and resistance exercises, with resultant hull vibrational stress and contamination of the cabin environment by sweat droplets.
Physiologic adaptation to microgravity necessitates readaptation to Earth-normal gravity, with consequent temporary incapacitation of varying severity. Additionally, microgravity complicates materials handling, waste management, cabin environment hygiene and the like.
Artificial Gravity holds the potential to resolve or ameliorate all of these problems. On-board centrifugation on Kosmos-782 in 1975 showed that 1.0 g for 24 hours a day is sufficient to stop physiological deconditioning (1). Eliminating the need to readapt to Earth’s gravity would do away with the temporary incapacitation that complicates emergency landing planning. AG would settle airborne contaminants and cancel the danger imposed by floating material, as well as freeing hours per day of valuable astronaut working time.
BRIEF OVERVIEW OF ARTIFICIAL GRAVITY
As early as 1911, K.E. Tsiolkovsky recognized the potential for using rotation of a spacecraft in generating artificial gravity (AG) (2). Hermann Noordung’s book The Problem of Space Travel (1927) presented the first detailed engineering proposal for an AG station, many of the details finding their way into Werner von Braun’s 1952 wheel-shaped station design as depicted in Collier’s magazine (3).
In 1966, a spacewalking Richard F. Gordon attached a tether to an orbiting Agena rocket, and after a lot of effort (with "Pete" Conrad) put the tethered spacecraft into slow rotation, creating the first artificial microgravity (4). Crewmembers aboard Skylab tried combining exercise with microgravity by running around the inside perimeter its 22-foot diameter Orbital Workshop.
More recently, on-board centrifuges were demonstrated effective for animals in the Kosmos flights and feasible for humans in Graybiel’s Slow Rotating Room studies (5). Various proposals for human-powered centrifuges (thus combining AG with aerobic exercise) were considered (6), but difficult to demonstrate in Earth’s gravitational field.
DESIGN CONSIDERATIONS
Centripetal acceleration is translated into artificial gravity using the equation
F = w2r (equation 1)
Since using revolutions per second gives r = F , it’s easier to convert using…
(2pi/60)2*w2
F = (0.011)w2r (equation 2)
Where w is angular acceleration (say, in revolutions per minute) and r is the length of the radial arm (say, in meters). Thus, to generate an Earth-normal ‘gravity’ of 9.8 meters/second2, if our radial arm is 4 meters (radial arm of the ISS TransHab), we need a rotational rate of about 15 revolutions per minute. While not all considerations apply equally to all designs (as we will see), engineering design concerns include…
COST Current price tag on a launch of material of Low Earth Orbit is estimated to be about $10,000 per pound (7). Given that Mass = Money, we have very strong incentive to minimize mission mass.
Any AG will necessitate thicker hulls (Apollo modules could be paper-thin only because of low gravity), and thus raise the price tag dramatically. In addition, for a cylindrical space station (for instance) each meter increase in the radial arm increases hull material (and thus, roughly, station mass) by more than 6 meters. A longer radial arm equals much higher costs.
‘WOBBLE’ Spinning any spacecraft produces an unavoidable oscillating motion in flexible components. Energy dissipation (by internal friction of the components) causes the wobbling amplitude to increase, until attitude control thrusters must be fired to bring the spacecraft’s amplitude back to nominal (8). For example, mobile liquid propellant in a partially filled spinning tank provides a massive source of unwanted oscillation.
This ‘wobble’ not only increases propellant mass, but imparts an unwanted vibration to sensitive scientific experiments and materials, which then need vibration shielding, which further increases mass (which is likely also flexible, causing oscillation, etc.).
LOAD BALANCE
A spinning system requires any mass to be equally balanced throughout. Ever see a clothes dryer with an imbalanced load? That clattering, bone-shaking machine is your spacecraft if the rotating load becomes unbalanced. Thus, any system with mobile components (you, for instance) must have a counter-balancing system to ‘spread out’ the weight. The International Space Station’s (ISS) on-board centrifuge (for plants and small animals), for example, uses a computer-driven active-balancing system to compensate for changes in weight distribution. Of course, this increases mission mass, and thus, cost.
A rotating mass also poses interesting questions in propulsion and trajectory, but these can generally be worked out mathematically before the system is in orbit. ‘Gyroscopic stiffness’, the upward torque on a rotating system that keeps a spinning top upright, can also complicate propulsion.
SYSTEM REQUIREMENTS
While a rotating craft solves some problems (distributing solar heat loads or controlling location of liquid propellant, for instance), it can create others. Structures like solar arrays, which maximize efficiency by orienting towards the sun, need to be isolated from the craft’s rotation. Some communication systems need to be oriented towards Earth or a relaying satellite, and thus need isolation.
SPIN/DESPIN PROBLEMS
A rotating craft is not acceptable in all phases of a mission. Aerobraking, for example, which saves propellant by using a planet’s atmosphere to slow to orbital speed (as was used so successfully in Mars Global Surveyor), requires an aerobraking shell oriented to catch the atmosphere. Docking with another craft is complicated by rotation, and may require de-spinning.
AG is lost on despinning, and subjects the crew to the nausea and vomiting, disorientation and loss of coordination they lost on adapting to the rotating environment (9). If rotation was slow enough that little adaptation was needed, despinning still results in loss of AG, with rapid onset of space motion sickness and fluid redistribution.
HUMAN FACTORS CONSIDERATIONS
If humans (or any other animal) are included in the payload, other considerations become apparent. These problems include…
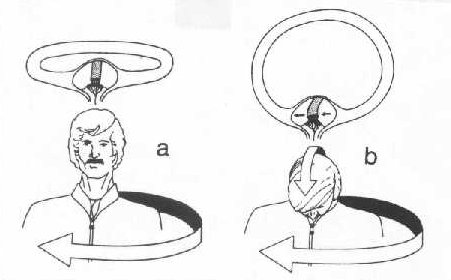
CORIOLIS FORCES
Sustained rotation in a given plane (as when in a rotating craft)
causes the inner-ear fluid to flow with the same angular velocity (see Figure
1). If the head is moved out of the plane of rotation (as by turning your
head), the continuing fluid movement in the old plane gives a sense of rotation
in the new plane, even though no such movement is occurring (10). This
disorienting and nauseating sensation, called Coriolis cross-coupling, is made
worse by high rotation rates and short radial arms, as are all problems listed
here.
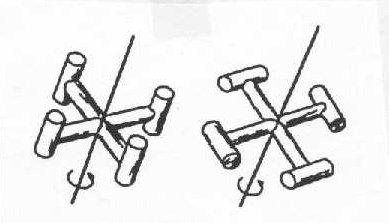
Any movement not parallel to the axis of rotation will provoke Coriolis forces. An astronaut climbing towards the axis of rotation (see Figure 2a) decelerates as he/she moves into an area of lower velocity, and experiences a force in the direction of rotation. An astronaut climbing down the same ladder (see Figure 2b) feels a force pushing him/her against the direction of rotation.
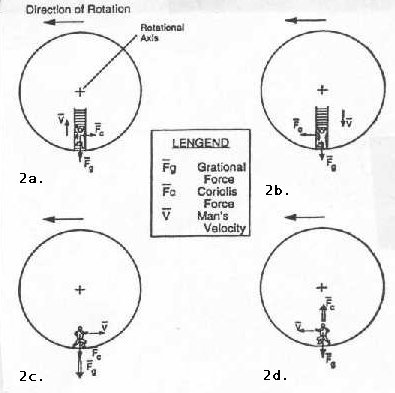
An astronaut running in the direction of rotation (Figure 2c) gains angular velocity and thus feels heavier, and one running against rotation feels lighter (Figure 2d). Research at NASA Langley Rotating Space Station Simulator indicates that ambulation in the direction of rotation at rotation rates corresponding to greater than 0.3 g produces a disturbing heaviness in the legs, while ambulation against the direction of rotation is not possible below 0.05 g (11).
Finally, Coriolis forces act on any moving object; even fluid poured in
a rotating field deviates in its course (Figure 3).

GRAVITY GRADIENTS
As seen from equation 1, centripetal acceleration (‘gravity’) is a linear function of radius; thus, there is a 100% gravity gradient running from the axis of rotation to the outer rim. An object weighing 10 kg on the ‘floor’ (rim) would weigh 5 kg if moved half-way up towards the ‘ceiling’ (axis) (see Figure 4). The percentage weight change an object moving from Ra to Rb experiences is given by:
W1/W2 = (Ra –
Rb)/Rb (equation 3)
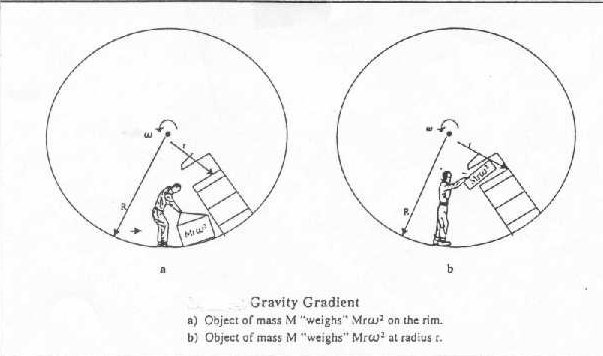
Thus, an object raised to a 1 meter shelf in a 4-meter rotating station (from Ra = 4 m to Rb = 3 m) would lose 25% of its weight. It is unknown how this sudden weight loss would affect materials handling; e.g., would a suddenly lightened box tend to fly out of one’s hands?
In addition, a 2-meter tall astronaut standing in a 4-meter rotating station would feel literally ‘light-headed’; the head (nearer the axis of rotation) weighs 50% less than the feet!
Despite these concerns, the gravity gradient appears to be the problem of least concern in designing a rotating habitat (12), and was considered a ‘non-problem’ in NASA’s recent Artificial Gravity Working Group (13).
AG SHIP DESIGNS
Over the years, numerous designs have been proposed for rotating craft utilizing centripetal acceleration as ‘gravity’. Each design accepts its own profile of advantages and disadvantages. The more prominent designs are…
ROTATING TORUS
This is the design everyone is familiar with (Figure 5), proposed by
Werner von Braun and popularized by Stanley Kubrick’s 2001: A Space
Odyssey. It has much to recommend it. It is roomy, and its large weight
minimizes the counter-balancing compensation needed to keep rotation stable.
Its '‘spokes' (radiating out from hub to rim), having the same gravity
gradient mentioned in the last section, provide ready access to gravity varying
from 0 g (at the hub) to 1.0 g (at the rim). Indeed, such a station, with
various gravities at different levels, could provide an ideal
‘rehabilitation center’ for astronauts returning to Earth; starting
at the level of their adopted gravity field (at the hub for open space,
1/6th out on a spoke for lunar gravity, 1/3rd out for
Martian gravity, etc.), each astronaut could gradually re-acclimate to
progressively stronger gravities, returning to Earth after acclimatizing for a
full 1 g.
Unfortunately, von Braun’s rotating torus is the most massive, and thus the most expensive, design. Such a massive structure demands on-orbit assembly, with multiple launches and EVA assemblies (although one proposed design, utilizing flexible waveguide for a "Self-Reconfiguring Gravity Station", requires only one Shuttle-type launch) (14). Thus, while likely useful in the long-term, it is unlikely to be implemented in the foreseeable future.
ROTATING ‘DUMBBELL’
A more modest version of the rotating torus (figure 6) calls for maintaining the ‘flywheel’ design, but instead of an outer rim, using modules (axial or in-plane) at the ends of the ‘spokes’ (15). This design sacrifices some volume for later expandability to a full torus (if in-plane modules are used), but is still massive enough to be too ambitious in the short-term.
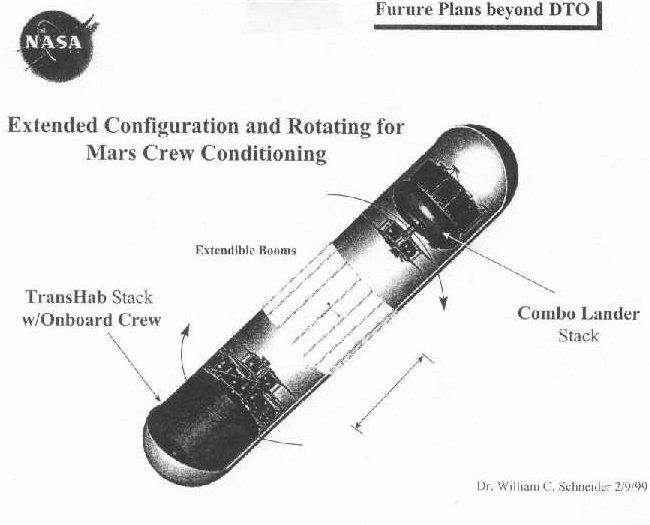
RIGID TRUSS
A further modification from the rotating dumbbell replaces the ‘spokes’ with a simple, unpressurized truss. This relieves the station of much mass, but sacrifices the various gravity-levels available along the axial components (now unpressurized). One variant of this design, the TransHab for Human Mars Mission, is favored by JSC’s AG Working Group (figure 7).
FLEXIBLE
TETHER
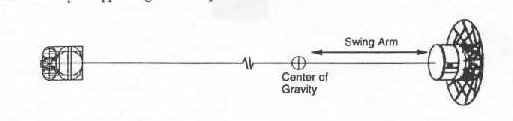
A still simpler design replaces the rigid truss with a tether; a
‘rope’, essentially, holding the two rotating elements together
(figure 8). This design eliminates still more weight and allows for very long
rotational arms (and thus, very slow rotational rates, which minimize Coriolis
forces and gravity gradients).
It introduces potential problems, however. Accelerating and braking thrusts must be done slowly, with less force than the ‘centrifugal’ force holding the tether taut. If the tether breaks, as it did in the 1996 TSS-1R mission (due to buildup of electrodynamic energy) and the 1994 SEDS-2 mission (due to tether severed by debris or a micrometeoroid), artificial gravity is lost, as well as the counterbalancing module on the other end of the tether. Possible solutions are to keep mission-critical components off the counter-weight (as in using a burnt-out upper stage), and using a multistrand design like the Hoytether (16).
The Naval Center for Space Technology’s TiPS (Tether Physics and Survivability) experiment, deployed in 1996, is a 4 km tether utilizing librational (‘pendulum-like’) motion and is still in orbit 2 ½ years later. Sadly, their ATEx (Advanced Tether Experiment) failed deployment on 16 Jan 99. The TSS-1 and 1R Space Shuttle missions did gather important data, however both missions were marred with failure and cost NASA approximately $500 million. NASA is currently cautious on tethers. Despite disappointments, tethers appear promising in minimizing weight and rotational rates.
ON-BOARD CENTRIFUGE
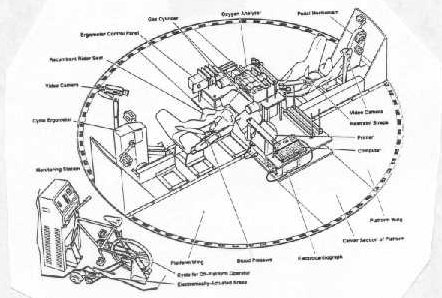
Some designs call for a small centrifuge on board a non-rotating craft.
One design, the Human Powered Centrifuge, proposes combining exercise with
self-generation of rotational energy (figure 9). Another design (a long-term
recommendation of NASA’s Artificial Gravity Working Group) suggests a
Powered Exercise Centrifuge with exercise equipment (treadmill and exercycle)
moving against the direction of rotation (figure 10).
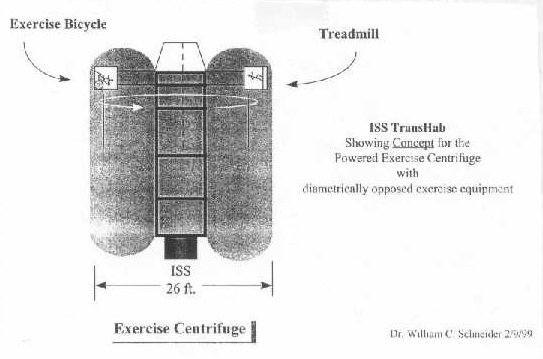
Although the necessarily short radial arm maximizes rotation rate and human factor problems, the on-board centrifuge is seen as the nearest-term technology. As mentioned, a small on-board centrifuge (for plants and small animals) is planned for ISS.
UNANSWERED QUESTIONS
Numerous questions remain to be answered before AG is a reality. For example, how much artificial gravity is needed? 1.0 g for 24 hours a day is sufficient (1), but is that much necessary? Some research using ground-based research as a model indicates that significantly less exposure is needed (17), but length of exposure needed is not known.
What intensity of gravity is optimal? Does exposure to greater than 1.0 g reduce the time needed? Current exercise countermeasures take up a significant amount of an astronaut’s working day, and exercise poses vibrational and hygiene problems; high-g exposure for shorter periods (if found effective) could significantly increase an astronaut’s efficiency.
Is passive exposure to gravity sufficient, or is exercise in gravity needed? As a related question, is one time of day (or night) optimal for AG exposure? Ames’ Artificial Gravity Sleeper could be accommodated on the Station, or even in the Shuttle Bay, if it were found to be workable and effective (18).
Finally, is it even desirable to maintain a 1 g conditioning on long-duration missions? Given that most of the body’s changes appear to be physiologic adaptations to its new environment, perhaps a period of reconditioning before returning to Earth-normal gravity would be better tolerated, more ‘natural’. Alternately, given extended-duration missions or colonization, artificial gravity might indeed be counterproductive (19).
Much work remains to be done before artificial gravity can be effectively employed as a countermeasure to long-duration spaceflight.
REFERENCES